


JKBLD300 300W Brushless BLDC Motor Driver
JKBLD300 300W Brushless BLDC Motor Driver
JKBLD300 300W Brushless BLDC Motor Driver is a 300W Brushless DC Motor Driver that can operate a 3-phase Brushless DC Motor with Ingenium Drives, Hall Effect Sensors in a closed loop configuration.
The 300W Brushless DC Motor Driver can be controlled in two different ways, either with an external controller that provides signals to the driver such as PLC and SCM, or with the help of an internal potentiometer to control the speed of the BLDC Motor. At the same time, the drive has large starting torque, fast start and brake, and positive and negative switching, which is a combination of manual and automatic control.
Application areas are mainly industrial machinery and autonomous robots.
Features
- Supply Voltage: 18-50VDC
- Output Current: 15-35A
- Available Motor Speed: 0 - 20000 RPM
- Hall Sensor Voltage: 4.5 - 5V DC
- Potentiometer: 10k ohm
|
Driver Parameters |
Minimum Value |
Recommended Value |
Maximum Value |
Unit |
|
Output Current |
0 |
15 |
35 |
A |
|
Supply Voltage |
18 |
50 |
VDC |
|
|
Hall drive current |
- |
20 |
- |
mA |
|
Hall signal voltage |
4.5 |
5 |
5.5 |
V |
|
Applicable engine speed |
0 |
- |
20000 |
RPM |
|
Environmental Factors |
Environmental Indexes |
|
Things to Avoid |
Dust, Oil Stains and Corrosive gas |
|
Working Temperature Range |
10℃~+50℃ |
|
Humidity |
40-90%RH (no condensation) |
|
Vibration |
5.9m/s2 Max |
|
Standby Temp. Range |
-20℃~+125℃ |
|
Cooling |
|
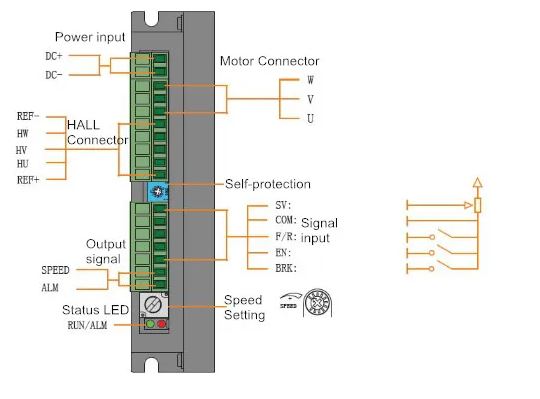
Drive Interface and Pinout
|
Signal |
Terminal |
Function |
|
Input |
SV |
1.External potentiometer; 2. Analog signal input; 3.PWM pulse width. |
|
COM |
Common connection point (0V reference level) |
|
|
F/R |
High level input motor will rotate clockwise, low level input or F/R and COM connected motor will rotate counterclockwise |
|
|
EN |
High level input motor will stop slowly, low level input or EN and COM connected motor works |
|
|
BRK |
When a high level is added or the connection point is suspended, the motor brake stops; when a low level is added or EN and BRK are connected, the motor runs |
|
|
Output |
ALM |
The fault output signal of the motor or drive is 5V under normal conditions; When a fault occurs, the level is 0V. |
|
SPEED |
|
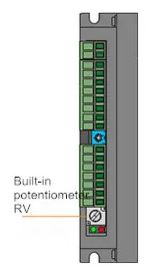
Four speed regulation modes
Built-in potentiometer RV
Turn the RV knobs clockwise until a "click" sound is heard, the motor starts to run. Turn the RV knobs clockwise, the motor will accelerate. Turn the RV knobs counterclockwise, the motor speed will decrease, and the motor will stop until a "click" sound is heard.
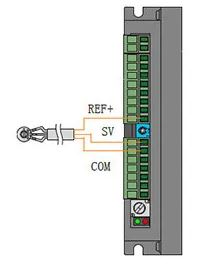
External potentiometer
Use a suitable potentiometer with a resistance value of 10KΩ, connect the middle terminal to the SV terminal, and connect the other two terminals to the REF+ terminal and the COM terminal respectively.
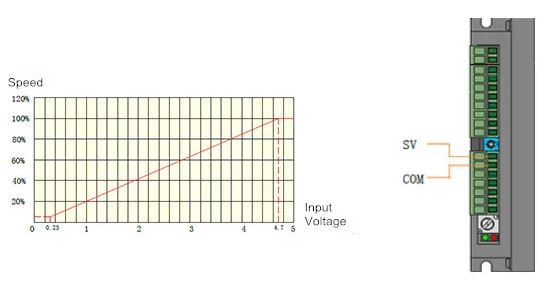
Input analog signal (0-5V)
When the input voltage is 0.25V, the motor speed is 5% of the maximum speed; When the input voltage is about 4.7V, the motor speed is the maximum value.
PWM Pulse Width
Frequency: 1-3KHz Amplitude value: 5V
Pulse width: Adjust the duty ratio for speed regulation.
